Installing GRAIC locally
Dependencies
- Carla 0.9.13
- Scenario Runner 0.9.13
- Python3.7+
Installing the Carla 0.9.13 simulator
The official installation guide can be found at https://carla.readthedocs.io/en/0.9.13/start_quickstart/#carla-installation. A simplified walkthrough is provided below.
Step 1 Download the Carla 0.9.13 simulator at https://carla-releases.s3.eu-west-3.amazonaws.com/Linux/CARLA_0.9.13.tar.gz.
Step 2 Extract it into a favored path (ie. /home/CARLA_0.9.13)
Step 3 Run sudo apt install libomp5 as per this git issue.
Step 4.1 Add the Carla API to your python path by appending the following lines to your bashrc file (~/.bashrc). Replace PATHTOCARLA with the path used in Step 2.
export PYTHONPATH=$PYTHONPATH:PATHTOCARLA/PythonAPI/carla/
export PYTHONPATH=$PYTHONPATH:PATHTOCARLA/PythonAPI/carla/dist/carla-0.9.13-py3.7-linux-x86_64.egg
Step 4.2 Source the bashrc file by running source ~/.bashrc.
Step 5 Install pygame by using python3 -m pip install --user pygame numpy
Step 6 Open the simulator using the following commands. Replace PATHTOCARLA with the path used in Step 2.
cd PATHTOCARLA
./CarlaUE4.sh
If all the above steps have run correctly, you should see something like in the below image.
Install GRAIC Customized Maps for Carla 0.9.13
The official installation guide can be found at https://carla.readthedocs.io/en/0.9.13/tuto_M_add_map_package/. A simplified walkthrough is provided below.
Step 1 Download the 5 raw maps from https://drive.google.com/drive/folders/13xQbCmlUFVmyqN-elPB8LHSIBsaeLbnZ?usp=sharing.
Step 2 Place the 5 tar.gz files in the corresponding import path (ie. PATHTOCARLA/import)
Step 3 Import the map using the following:
cd PATHTOCARLA
./ImportAssets.sh
If all the above steps have run correctly, you should now be able to switch to any of the maps. To do this, run the following commands:
cd PATHTOCARLA
./CarlaUE4.sh
Open a new terminal and run the following.
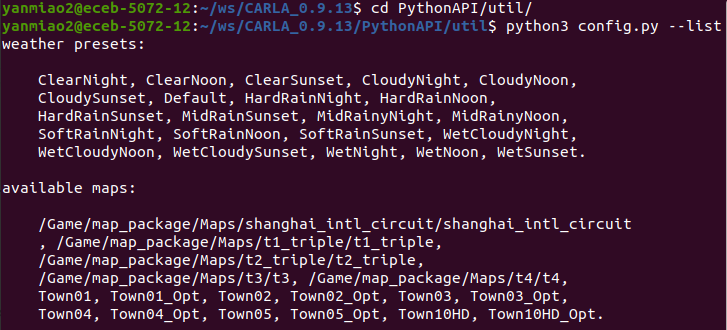
cd PATHTOCARLA/PythonAPI/util
python3 config.py --list
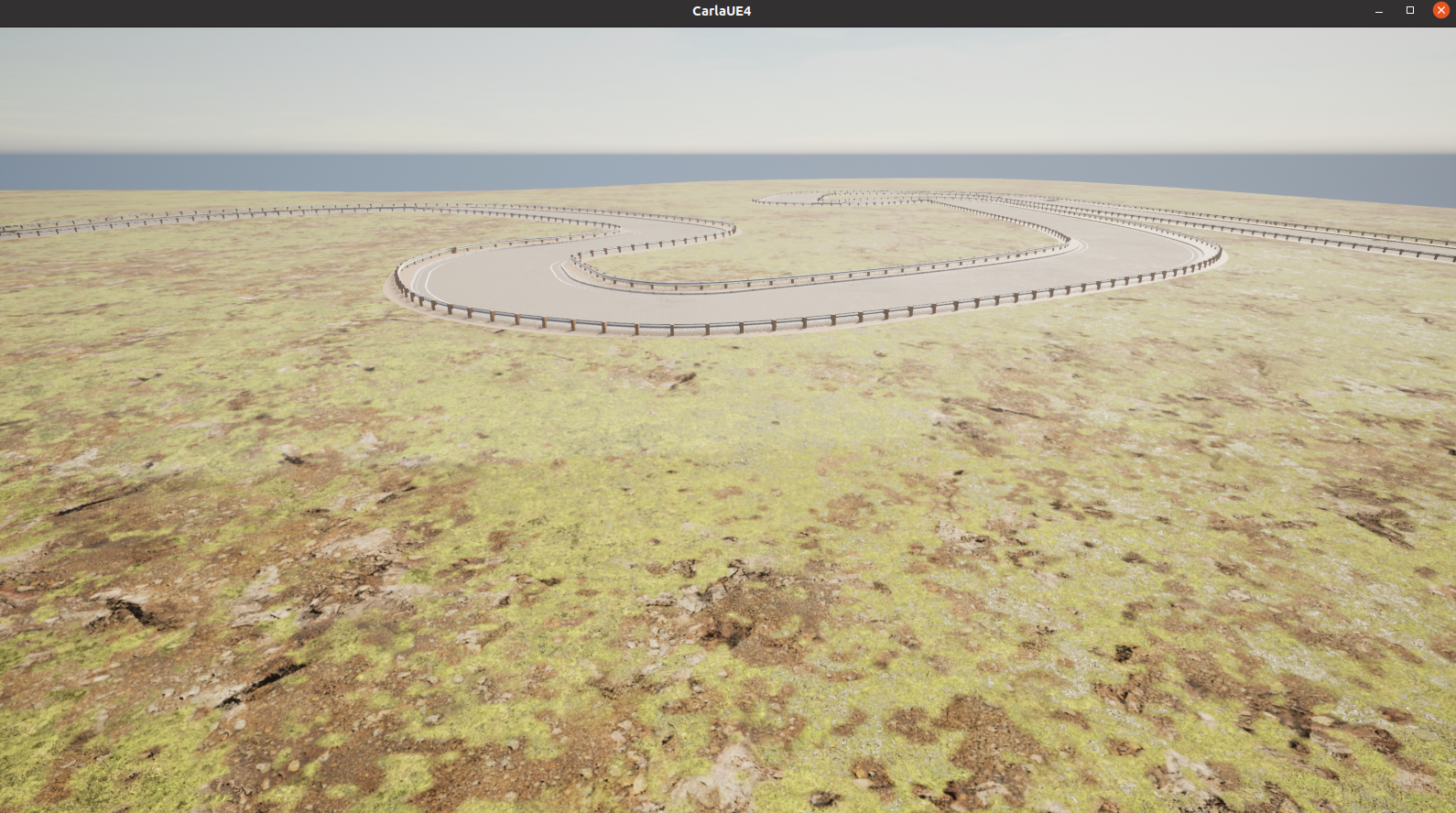
You should now see 5 maps imported named Shanghai, t1, t2, t3, and t4.
You can switch to any of the maps using the following command and replacing PATHTOMAP with the path to the maps shown by python3 config.py --list.
python3 config.py -m PATHTOMAP
Installing GRAIC Customized Scenario Runner
We are using a customized Scenario Runner, so please do NOT pull from the official SR repo, but USE our GRAIC repo
Step 1 Download the CUSTOMIZED 0.9.13 Scenario Runner from the GRAIC public repo https://github.com/PoPGRI/scenario_runner.
Step 2 Extract Scenario Runner into your favored path (ie. /home/scenario_runner-0.9.13)
Step 3 Install Scenario Runner Dependencies using the following commands. Replace PATHTOSR with the path used in Step 2.
cd PATHTOSR
python3 -m pip install -r requirements.txt
Step 4.1 Add the Scenario Runner API to your own python path by appending the following line into your bashrc file( ~/.bashrc). Replace PATHTOSR with the path used in Step 2.
export PYTHONPATH=$PYTHONPATH:PATHTOSR
Step 4.2 Source the file by running source ~/.bashrc
Step 5 Check the installation by running from scenario_runner import ScenarioRunner in Python. If you have completed the above steps correctly, then there should be no import errors.
Installing GRAIC Customized Scripts
Step 1 Download GRAIC infrastructure scripts for 2022 at https://github.com/PoPGRI/Race/tree/main.
Step 2 Place the folder into your preferred path (ie. /home/Race)
Step 3 Implement your controller in agent.py. The inputs are the Ground Truth Perception Data.
Step 4 You are now ready to launch GRAIC.
Step 4.1 (Terminal 1) Launch the simulator
cd PATHTOCARLA
./CarlaUE4.sh
Step 4.2 (Terminal 2) Change the map. In this example we will use the Shanghai map.
python3 config.py -m /Game/map_package/Maps/shanghai_intl_circuit/shanghai_intl_circuit
Step 4.3 (Terminal 3) Run python3 wrapper.py. This should be in the /Race/ folder.
Note: you may use pkill to kill python if the car dies and the scenario keeps running. Check the code in wrapper.py to enable/disable scenarios to help with debugging
Additional comments
- Carla Documentation: Python API
- Model + Track: The code released only runs the Tesla Model 3 on the Shanghai Track, but during testing we will use different models + different race tracks.
Simple Controller Demo
A simple controller demo can be found at here.